In Bearbeitung
Stand: 20. März 2026
 Automatic translation by
GOOGLE:
Automatic translation by
GOOGLE:
https://www-kh--gps-de.translate.goog/locator.html?_x_tr_sch=http&_x_tr_sl=de&_x_tr_tl=en&_x_tr_hl=de&_x_tr_pto=wapp

Abb.1 Gesamtansicht der Locator-Decodereinheit
Schon seit vielen Jahren gibt es eine Fülle von Anwendungen, die sich der Maidenhead-Locatordaten bedienen. Diese setzen sich aus einer kurzen Folge gebräuchlicher Buchstaben und Ziffern zusammen und erlauben damit die weltweite Definition rechteckförmiger geographischer Bereiche. Tabelle 1 liefert eine Übersicht über die verschiedenen Datenformate mit 4-10 Charaktären und den sich daraus für Standorte in Mitteleuropa ergebenden Detaillierungsgraden.
Tabelle 1 Detaillierungsgrade der einzelnen
Locatorversionen
Im Amateurfunkbetrieb werden Locatordaten üblicherweise zur Bestimmung des eigenen Standortes benutzt, lassen sie bedarfsweise aber auch auf dem Funkweg an Gegenstationen übertragen. Hierbei handelt es sich entweder um Festwerte oder von angeschlossenen GPS-Empfängern stammende und danach konvertierte Livedaten. Während die 6-stellige Variante dabei als das Standardformat bezeichnet werden kann, begnügt man sich bei verschiedenen digitalen Modes ( z.B. bei FT8 ) und speziell Kurzwellenanwendungen mit dem 4-stelligen Format.
Mein Interesse aber galt speziell dem 10-stelligen Format mit seinen dabei definierten Rechteckbereichen mit Abmessungen von nur etwa 20x25m. Mir war dabei allerdings bewusst, dass ich mich damit schon in einem Bereich bewegen würde, der unterhalb des vom US-Netzbetreiber für zivile GPS-Anwendungen ermöglichten Genauigkeitsbereiches liegen würde. Bei Betrieb eines GPS-Empfängers an einem hierfür nicht optimalem Standort ( also ohne freie Sicht zum Himmel und rundum bis zum Horizont ) waren wechselnde Locatoranzeigen auch bei stationärem Betrieb zu erwarten und würden sich dabei vorzugsweise auf die letzten beiden der angezeigten Stellen auswirken.

Abb.2 verwendetes LiLyGo ESP32-Modul mit 1.14"-TFT-Display
Damit ging es um den Aufbau eines entsprechenden einfachen Decoders, der nur aus einem GPS-Empfängermodul und einem Mikrocontrollerbaustein mit zugehörigem Display bestehen sollte. Nach einiger Suche schien mir der seit einiger Zeit erhältliche LiliGO-Baustein mit ESP32-Prozessor und 1.14"-TFT-Display [ gem. Abb.2 ] als hierfür besonders gut geeignet zu sein. In kompakter Weise vereint er einen leistungsfähigen Prozessor mit möglichen Zusatzfunktionen wie z.B. Bluetooth und ein 1.14"-TFT-Farbdisplay mit einer Auflösung von 135x240 Pixeln. Für externe 5V-Speisung und zur Programmierung besitzt er einen C-USB-Anschluß, erlaubt aber auch den Betrieb über einen anschaltbaren 3.7V-Akku. Somit war zur Komplettierung als vollständige Decodereinheit nur noch ein zusätzliches GPS-Modul erforderlich.
Die erstellte Software verwendet die bekannte TinyGPSPlus-Library von Mikal Hart. Die zur Wandlung der GPS-Daten in das 10-stellige Maidenheadformat benutzte Routine wurde an das ARDUINO-Format angepasst und basiert dabei auf einer älteren, von OE3HBW stammenden BASCOM-Version.
Die realisierte Softwareversion ermöglicht die Displaydarstellung von GPS-Urzeit in GMT, der vom Empfängermodul gelieferten Daten von Breiten- und Längengrad, eines daraus konvertierten 10poligen-Maidenhead-Locatorwertes, sowie der Anzahl ausgewerterter GPS-Satelliten. Erfahrene Satellitenutzer wissen, daß es nach Betriebsbeginn abhängig vom Einsatzstandort und auch der jeweilgen Empfängerkonstellation einige Minuten dauern kann, bis ein sog. "GPS-Fix" erfolgt ist und verlässliche Daten angezeigt werden. Erfahrungsgemäß beginnt das mit der Anzeige korrekter Zeitwerte, erfordert für die restlichen Daten aber den Empfang von mindestens 3-4 Satelliten. Kleinere Abweichungen können sich hinsichtlich dieses Verhaltens bei Verwendung unterschiedlicher Typen von GPS-Moduln ergeben.
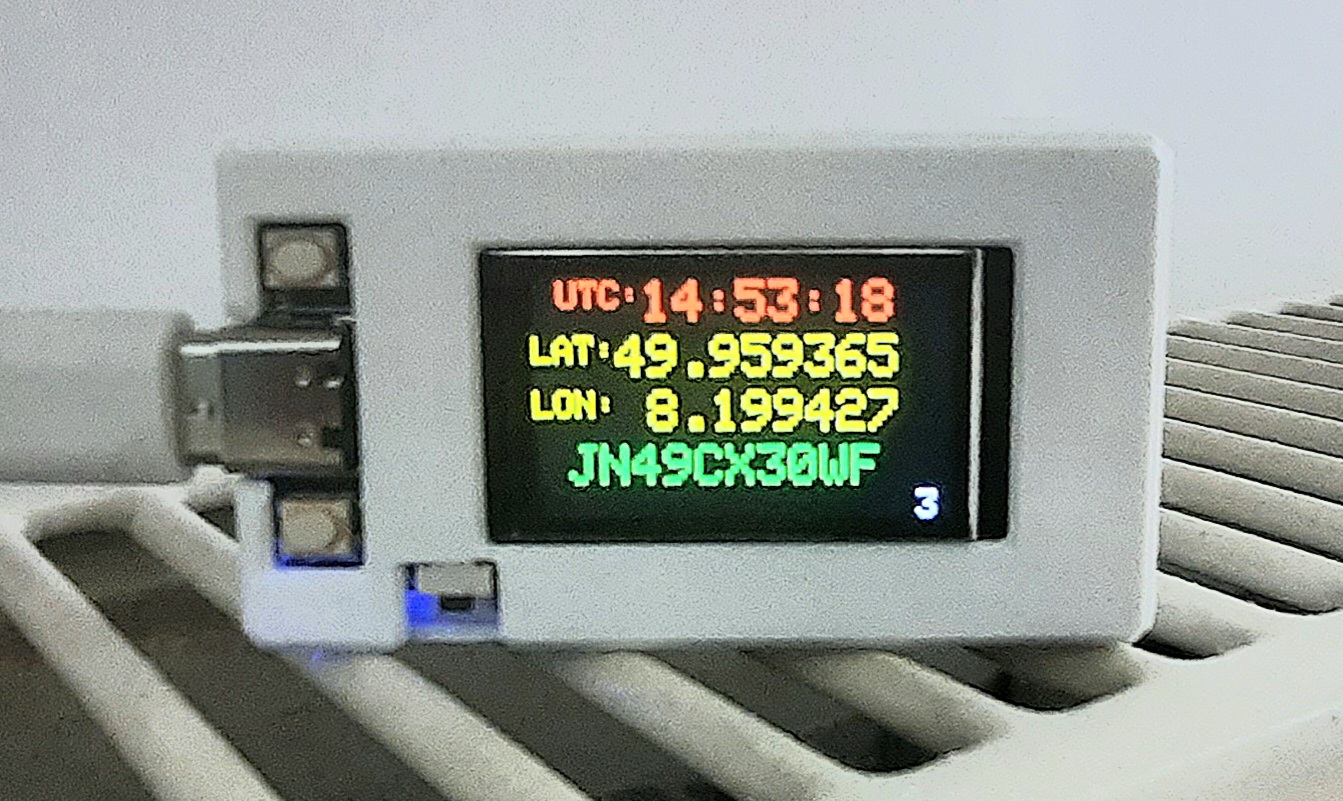
Abb.3 Locator-Decodereinheit in Betrieb
Nachdem zum Leistungsumfang der ESP32-Prozessoren auch eine Bluetooth-Funktion gehört, lag es nahe, sie zu verwenden, um die auf dem Display angezeigten Daten bei Bedarf auch noch parallel dazu über Distanzen von einigen Meter drahtlos übertragen zu können. Dazu ist ausgehend von üblicherweise einem PC oder Smartphone/Tablet einmalig ein "Pairing" mit dem Decodermodul herzustellen, wobei sich das Letzgenannte dabei unter dem Namen "LILIGO-LOCATOR" meldet. Zum Datenempfang mit einem Smartphones/Tablets eignet sich im einfachsten Fall ein Bluetooth-Terminalprogramm ( gem. Abb.4a ).
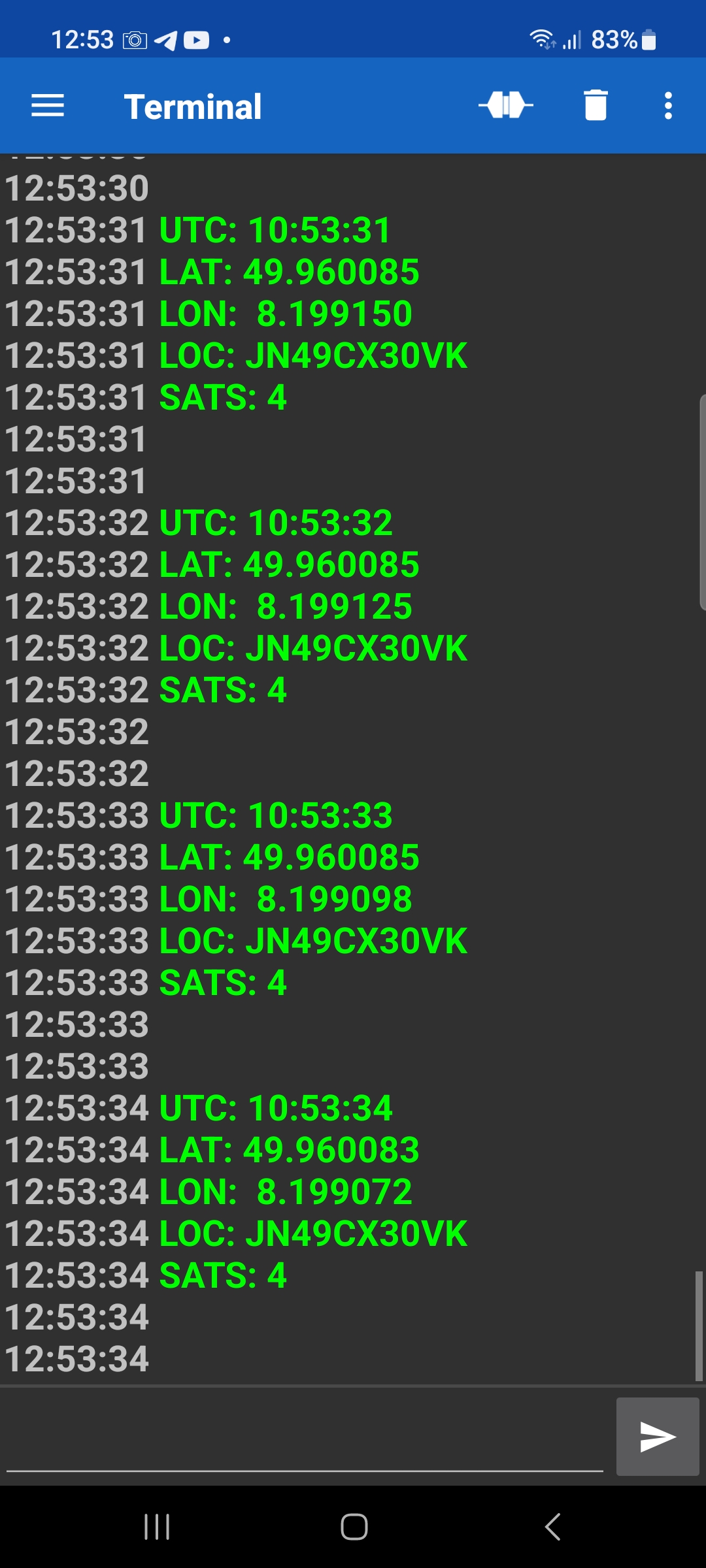
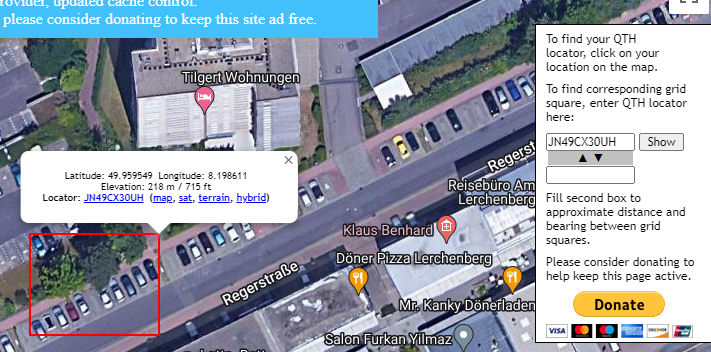
Abb.4a Anzeige der Bluetoothdaten Abb.4b Kartenausschnitt der K7FRY-Seite mit Bereichsmarkierung gem. 10pol-Locatordaten
Zur Kartendarstellung ( siehe Abb.4b ) bis zu 10-stelliger Locatordaten am PC/Smartphone usw. gibt es auf der Internet-Seite von K7FRY ein hierzu hervorragend geeignetes Tool [3].
Als GPS-Modul wählte ich eine Version mit serieller Bereitstellung von 9600bps-NMEA-Daten bei TTL-Pegeln, sowie einem Betriebspannungsbereich von ca. 3-5V und einer integrierten Patch-Antenne, wobei an dieser Stelle selbstverständlich auch Versionen mit separater Antenne nutzbar sein würden. Die Zusammenschaltung von ESP32-Prozessor und GPS-Modul erfolgt über lediglich 3 Leitungsverbindungen, als da sind: Masse, +5V und der seriellen Datenzuführung vom GPS-Modul an den ESP32-Port: "GPIO27" ( siehe dazu auch Abb.7 ).
Besondere Nachbauhinweise ergeben sich ansonsten nicht.


Abb.5a GPS-Modul auf Gehäuserückseite und Abb.5b verwendbares Thingiverse-Gehäuse
Wie aus den Abb.1, 3, 5a und 5b zu ersehen ist, gibt es für das verwendete Prozessormodul ein kleines passendes 3D-Gehäuse ( Thingiverse 3777859 ), welches z.B. hier [4] erhältlich ist.
Besonders für die weniger Geübten kann das Hochladen der benötigten Programmfiles incl. ggf. mehrer seiner Libraries unter Verwendung der Arduino-IDE eine oftmals kaum überwindbare Hürde darstellen. Da sollte es eine gute Nachricht sein, wenn die benötigte Software hier [1] bereits im BIN-Format vorliegt und mithilfe des von der Firma EXPRESSIF verfügbaren Windows-Tools "Flash Download" [2] nach nur wenigen zusätzlichen Eingaben auf unkomplizierte Weise in wenigen Sekunden zum Processor hochgeladen werden kann.
Vorher sind PC und ESP32-Baustein allerdings erst einmal kabelmäßig via USB miteinander zu verbinden. Nach PC-Aufruf des Flash-Download-Tools müssen gem. Abb.6a zuerst noch der verwendete Processortyp "ESP32" ausgewählt und anschliessend die OK-Taste betätigt werden. Im daraufhin gemäß Abb.6b erscheinenden neuen Fenster ist eine freie Eingabezeile auszuwählen und hier über das zugehörige "..."-Fenster in den jeweiligen Ordner zu verzweigen, in dem die zu verwendende BIN-Datei vorher abgelegt wurde. Nach ihrer Anwahl sollte sie auch in der entsprechenden Eingabezeile des Tools erscheinen. Im rechts daneben sichtbaren Fenster ist jetzt mit Eingabe des Hexwertes "0x10000" noch die zur Datenablage benutzte Startadresse einzugeben und durch Setzen eines Hakens am linken Rand die gesamte Zeile zu aktivieren. Beim Anstecken des ESP32-Bausteins sollte auch schon der für die Verbindung benutze COM-Port gefunden worden sein und nach Aufruf des Auswahlfenster neben "COM:" auch angewählt werden können. In den sonstigen Positionen sollte es genügen, die angezeigten Defaultwerte zu übernehmen. Nach Betätigung der Start-Taste kann anschliessend der Ladevorgang gestartet werden. Gemäß Abb.6c ist er dabei auch als Laufbalken verfolgbar und bereits nach wenigen Sekunden abgeschlossen. Beendet wird der Vorgang durch Drücken der Stop-Taste. Nach erfolgreichem Abschluss und ggf. noch einmal erforderlicher kurzer Betätigung des auf der Platinenunterseite des ESP32-Moduls befindlichen RESET-Tasters, sollten auf dem TFT-Display bereits einige Textzeilen entspr. Abb.7 sichtbar werden und die Decodereinheit soweit betriebsbereit sein. Wie schon oben beschrieben, ist danach allerdings immer auch noch der Zeitraum bis zum GPS-Fix abzuwarten.

[1] http://www.kh-gps.de/locator-v3-26.zip
[2] https://www.espressif.com/en/support/download/other-tools
[3] https://k7fry.com/grid/
[4] https://www.3d-loewe.de/
E-Mail contact via:
Automatic translation by
GOOGLE: https://www-kh--gps-de.translate.goog/locator.html?_x_tr_sch=http&_x_tr_sl=de&_x_tr_tl=en&_x_tr_hl=de&_x_tr_pto=wapp
NEU in 3/2026: Softwareversionen "V3-26":
hinzugekommen sind
* Anzeige von Höhendaten ( in Metern )
* Umschaltmöglichkeit zwischen drei Zeitzonen ( UTC, MEZ, MESZ ) incl. ihrer EEPROM-Speicherung.
( Zur Umschaltung wird die Taste oberhalb der USB-Buchse verwendet. )
* Umschaltmöglichkeit auf Anzeige von Geschwindigkeitswerten ( in Km/h )
( Zur Umschaltung wird die Taste unterhalb der USB-Buchse verwendet. )
* Verfügbarkeit von BIN-Dateien for GPS-Moduln mit Datenraten von 9600bps und auch 38400bps
HINWEIS: Der technologische Fortschritt macht sich auch bei GPS-Moduln bemerkbar, so dass an dieser Stelle nur die Verwendung von aktuellen Versionen empfohlen werden kann. Der Unterschied zu älteren Produkten macht sich dabei hauptsächlich durch deren verbesserte Signalempfangseigenschaften speziell auch bei nicht optimalen Bedingungen ( z.B. bei Indoorbetrieb ) bemerkbar. Ermöglicht wird das z.B. durch gleichzeitige Nutzung von Signalen mehrerer Satellitensysteme.
Der von mir derzeit favorisierte Modultyp ist der QUESCAN "G10A-F30", der z.B. bei AliExpress für weniger als 10 Euro erhältlich ist. Nachdem seine serielle Datenschnittstelle werkseitig ( defaultmäßig ) allerdings nicht mehr mit der früher üblichen Geschwindigkeit von 9600bps, sondern 38400bps arbeitet, ist auch eine entsprechende Anpassung des Steuerprogrammes erforderlich. Aus diesem Grunde sind die zum Hochladen auf den verwendeten LiLyGo-Baustein benötigten BIN-Dateien jetzt für beide infragekommenden Datenraten verfügbar. Siehe dazu die LINKLISTE am Ende der Seite.



Beispiele für Geschwindigkeitsanzeige, aktuell verwendetes GPS-Modul und verbesserte Empfangsleistung
hinzugekommen sind
* Anzeige von Höhendaten ( in Metern )
* Umschaltmöglichkeit zwischen drei Zeitzonen ( UTC, MEZ, MESZ ) incl. ihrer EEPROM-Speicherung.
( Zur Umschaltung wird die Taste oberhalb der USB-Buchse verwendet. )
* Umschaltmöglichkeit auf Anzeige von Geschwindigkeitswerten ( in Km/h )
( Zur Umschaltung wird die Taste unterhalb der USB-Buchse verwendet. )
* Verfügbarkeit von BIN-Dateien for GPS-Moduln mit Datenraten von 9600bps und auch 38400bps
HINWEIS: Der technologische Fortschritt macht sich auch bei GPS-Moduln bemerkbar, so dass an dieser Stelle nur die Verwendung von aktuellen Versionen empfohlen werden kann. Der Unterschied zu älteren Produkten macht sich dabei hauptsächlich durch deren verbesserte Signalempfangseigenschaften speziell auch bei nicht optimalen Bedingungen ( z.B. bei Indoorbetrieb ) bemerkbar. Ermöglicht wird das z.B. durch gleichzeitige Nutzung von Signalen mehrerer Satellitensysteme.
Der von mir derzeit favorisierte Modultyp ist der QUESCAN "G10A-F30", der z.B. bei AliExpress für weniger als 10 Euro erhältlich ist. Nachdem seine serielle Datenschnittstelle werkseitig ( defaultmäßig ) allerdings nicht mehr mit der früher üblichen Geschwindigkeit von 9600bps, sondern 38400bps arbeitet, ist auch eine entsprechende Anpassung des Steuerprogrammes erforderlich. Aus diesem Grunde sind die zum Hochladen auf den verwendeten LiLyGo-Baustein benötigten BIN-Dateien jetzt für beide infragekommenden Datenraten verfügbar. Siehe dazu die LINKLISTE am Ende der Seite.
Beispiele für Geschwindigkeitsanzeige, aktuell verwendetes GPS-Modul und verbesserte Empfangsleistung
Abb.1 Gesamtansicht der Locator-Decodereinheit
Schon seit vielen Jahren gibt es eine Fülle von Anwendungen, die sich der Maidenhead-Locatordaten bedienen. Diese setzen sich aus einer kurzen Folge gebräuchlicher Buchstaben und Ziffern zusammen und erlauben damit die weltweite Definition rechteckförmiger geographischer Bereiche. Tabelle 1 liefert eine Übersicht über die verschiedenen Datenformate mit 4-10 Charaktären und den sich daraus für Standorte in Mitteleuropa ergebenden Detaillierungsgraden.
| locator
data |
vertical
square length |
horizontal
square length |
| 4 characters ( e.g.: JN49 ) |
~ 110
Km |
~ 150
Km |
| 6 characters
( e.g.: JN49EF ) |
~ 4,7
Km |
~ 6,0
Km |
| 8 characters ( e.g.:JN49EF30 ) |
~ 470
m |
~ 600m |
| 10 characters ( e.g.:JN49EF30AB ) |
~ 20 m |
~ 25 m |
Im Amateurfunkbetrieb werden Locatordaten üblicherweise zur Bestimmung des eigenen Standortes benutzt, lassen sie bedarfsweise aber auch auf dem Funkweg an Gegenstationen übertragen. Hierbei handelt es sich entweder um Festwerte oder von angeschlossenen GPS-Empfängern stammende und danach konvertierte Livedaten. Während die 6-stellige Variante dabei als das Standardformat bezeichnet werden kann, begnügt man sich bei verschiedenen digitalen Modes ( z.B. bei FT8 ) und speziell Kurzwellenanwendungen mit dem 4-stelligen Format.
Das realisierte Decoderkonzept
Mein Interesse aber galt speziell dem 10-stelligen Format mit seinen dabei definierten Rechteckbereichen mit Abmessungen von nur etwa 20x25m. Mir war dabei allerdings bewusst, dass ich mich damit schon in einem Bereich bewegen würde, der unterhalb des vom US-Netzbetreiber für zivile GPS-Anwendungen ermöglichten Genauigkeitsbereiches liegen würde. Bei Betrieb eines GPS-Empfängers an einem hierfür nicht optimalem Standort ( also ohne freie Sicht zum Himmel und rundum bis zum Horizont ) waren wechselnde Locatoranzeigen auch bei stationärem Betrieb zu erwarten und würden sich dabei vorzugsweise auf die letzten beiden der angezeigten Stellen auswirken.
Abb.2 verwendetes LiLyGo ESP32-Modul mit 1.14"-TFT-Display
Damit ging es um den Aufbau eines entsprechenden einfachen Decoders, der nur aus einem GPS-Empfängermodul und einem Mikrocontrollerbaustein mit zugehörigem Display bestehen sollte. Nach einiger Suche schien mir der seit einiger Zeit erhältliche LiliGO-Baustein mit ESP32-Prozessor und 1.14"-TFT-Display [ gem. Abb.2 ] als hierfür besonders gut geeignet zu sein. In kompakter Weise vereint er einen leistungsfähigen Prozessor mit möglichen Zusatzfunktionen wie z.B. Bluetooth und ein 1.14"-TFT-Farbdisplay mit einer Auflösung von 135x240 Pixeln. Für externe 5V-Speisung und zur Programmierung besitzt er einen C-USB-Anschluß, erlaubt aber auch den Betrieb über einen anschaltbaren 3.7V-Akku. Somit war zur Komplettierung als vollständige Decodereinheit nur noch ein zusätzliches GPS-Modul erforderlich.
Infos zur Software und Datenauswertung
Die erstellte Software verwendet die bekannte TinyGPSPlus-Library von Mikal Hart. Die zur Wandlung der GPS-Daten in das 10-stellige Maidenheadformat benutzte Routine wurde an das ARDUINO-Format angepasst und basiert dabei auf einer älteren, von OE3HBW stammenden BASCOM-Version.
Die realisierte Softwareversion ermöglicht die Displaydarstellung von GPS-Urzeit in GMT, der vom Empfängermodul gelieferten Daten von Breiten- und Längengrad, eines daraus konvertierten 10poligen-Maidenhead-Locatorwertes, sowie der Anzahl ausgewerterter GPS-Satelliten. Erfahrene Satellitenutzer wissen, daß es nach Betriebsbeginn abhängig vom Einsatzstandort und auch der jeweilgen Empfängerkonstellation einige Minuten dauern kann, bis ein sog. "GPS-Fix" erfolgt ist und verlässliche Daten angezeigt werden. Erfahrungsgemäß beginnt das mit der Anzeige korrekter Zeitwerte, erfordert für die restlichen Daten aber den Empfang von mindestens 3-4 Satelliten. Kleinere Abweichungen können sich hinsichtlich dieses Verhaltens bei Verwendung unterschiedlicher Typen von GPS-Moduln ergeben.
Abb.3 Locator-Decodereinheit in Betrieb
Nachdem zum Leistungsumfang der ESP32-Prozessoren auch eine Bluetooth-Funktion gehört, lag es nahe, sie zu verwenden, um die auf dem Display angezeigten Daten bei Bedarf auch noch parallel dazu über Distanzen von einigen Meter drahtlos übertragen zu können. Dazu ist ausgehend von üblicherweise einem PC oder Smartphone/Tablet einmalig ein "Pairing" mit dem Decodermodul herzustellen, wobei sich das Letzgenannte dabei unter dem Namen "LILIGO-LOCATOR" meldet. Zum Datenempfang mit einem Smartphones/Tablets eignet sich im einfachsten Fall ein Bluetooth-Terminalprogramm ( gem. Abb.4a ).
Abb.4a Anzeige der Bluetoothdaten Abb.4b Kartenausschnitt der K7FRY-Seite mit Bereichsmarkierung gem. 10pol-Locatordaten
Zur Kartendarstellung ( siehe Abb.4b ) bis zu 10-stelliger Locatordaten am PC/Smartphone usw. gibt es auf der Internet-Seite von K7FRY ein hierzu hervorragend geeignetes Tool [3].
Nachbau
Als GPS-Modul wählte ich eine Version mit serieller Bereitstellung von 9600bps-NMEA-Daten bei TTL-Pegeln, sowie einem Betriebspannungsbereich von ca. 3-5V und einer integrierten Patch-Antenne, wobei an dieser Stelle selbstverständlich auch Versionen mit separater Antenne nutzbar sein würden. Die Zusammenschaltung von ESP32-Prozessor und GPS-Modul erfolgt über lediglich 3 Leitungsverbindungen, als da sind: Masse, +5V und der seriellen Datenzuführung vom GPS-Modul an den ESP32-Port: "GPIO27" ( siehe dazu auch Abb.7 ).
Besondere Nachbauhinweise ergeben sich ansonsten nicht.
Abb.5a GPS-Modul auf Gehäuserückseite und Abb.5b verwendbares Thingiverse-Gehäuse
Wie aus den Abb.1, 3, 5a und 5b zu ersehen ist, gibt es für das verwendete Prozessormodul ein kleines passendes 3D-Gehäuse ( Thingiverse 3777859 ), welches z.B. hier [4] erhältlich ist.
Programmierung
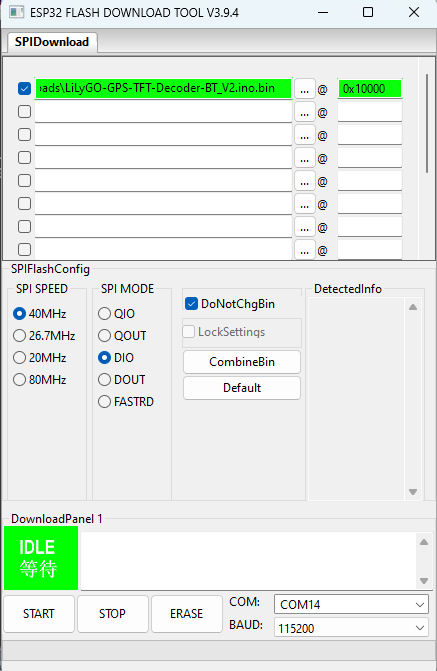
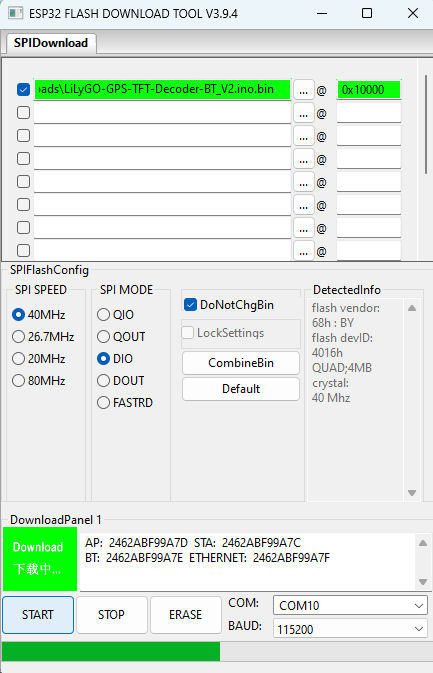
Besonders für die weniger Geübten kann das Hochladen der benötigten Programmfiles incl. ggf. mehrer seiner Libraries unter Verwendung der Arduino-IDE eine oftmals kaum überwindbare Hürde darstellen. Da sollte es eine gute Nachricht sein, wenn die benötigte Software hier [1] bereits im BIN-Format vorliegt und mithilfe des von der Firma EXPRESSIF verfügbaren Windows-Tools "Flash Download" [2] nach nur wenigen zusätzlichen Eingaben auf unkomplizierte Weise in wenigen Sekunden zum Processor hochgeladen werden kann.
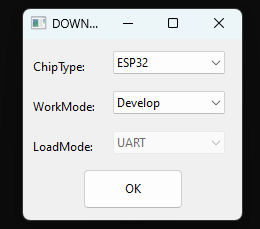
Abb.6a-c Eingabefenster des Flash-Tools ( 6b-c
zur Grossdarstellung anklicken )
Vorher sind PC und ESP32-Baustein allerdings erst einmal kabelmäßig via USB miteinander zu verbinden. Nach PC-Aufruf des Flash-Download-Tools müssen gem. Abb.6a zuerst noch der verwendete Processortyp "ESP32" ausgewählt und anschliessend die OK-Taste betätigt werden. Im daraufhin gemäß Abb.6b erscheinenden neuen Fenster ist eine freie Eingabezeile auszuwählen und hier über das zugehörige "..."-Fenster in den jeweiligen Ordner zu verzweigen, in dem die zu verwendende BIN-Datei vorher abgelegt wurde. Nach ihrer Anwahl sollte sie auch in der entsprechenden Eingabezeile des Tools erscheinen. Im rechts daneben sichtbaren Fenster ist jetzt mit Eingabe des Hexwertes "0x10000" noch die zur Datenablage benutzte Startadresse einzugeben und durch Setzen eines Hakens am linken Rand die gesamte Zeile zu aktivieren. Beim Anstecken des ESP32-Bausteins sollte auch schon der für die Verbindung benutze COM-Port gefunden worden sein und nach Aufruf des Auswahlfenster neben "COM:" auch angewählt werden können. In den sonstigen Positionen sollte es genügen, die angezeigten Defaultwerte zu übernehmen. Nach Betätigung der Start-Taste kann anschliessend der Ladevorgang gestartet werden. Gemäß Abb.6c ist er dabei auch als Laufbalken verfolgbar und bereits nach wenigen Sekunden abgeschlossen. Beendet wird der Vorgang durch Drücken der Stop-Taste. Nach erfolgreichem Abschluss und ggf. noch einmal erforderlicher kurzer Betätigung des auf der Platinenunterseite des ESP32-Moduls befindlichen RESET-Tasters, sollten auf dem TFT-Display bereits einige Textzeilen entspr. Abb.7 sichtbar werden und die Decodereinheit soweit betriebsbereit sein. Wie schon oben beschrieben, ist danach allerdings immer auch noch der Zeitraum bis zum GPS-Fix abzuwarten.
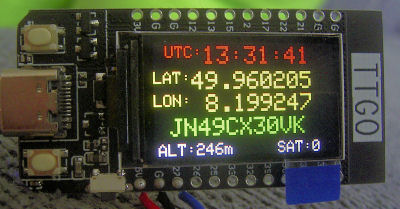
Abb.7 LilyGO-Modul ohne Gehäuse
mit angezeigter Einschaltmeldung
( siehe auch die Pins über die das GPS-Modul angeschlossen ist )
Farben der Verbindungskabel von GPS-Moduln zur Anschaltung an LiLyGo-ESP32-Modul:
GPS-Modul gem. Abb.5a.: +5V = rot; Masse = schwarz; Data-Out an GPIO27 = weiss
GPS-Modul "QUESCAN G10A-F30": +5V = rot; Masse = schwarz; Data-Out an GPIO27 = blau
NEU: Betrieb mit Akku
( siehe auch die Pins über die das GPS-Modul angeschlossen ist )
Farben der Verbindungskabel von GPS-Moduln zur Anschaltung an LiLyGo-ESP32-Modul:
GPS-Modul gem. Abb.5a.: +5V = rot; Masse = schwarz; Data-Out an GPIO27 = weiss
GPS-Modul "QUESCAN G10A-F30": +5V = rot; Masse = schwarz; Data-Out an GPIO27 = blau
NEU: Betrieb mit Akku
Nachdem bei den verwendeten Lilygo-Bausteinen auch der
Betrieb und die Lademöglichkeit für einen anschliessbaren 3,7V-Akku
vorgesehen sind und mehrere Leute dazu schon Fragen gestellt haben, beschäftigte
ich mich auch mit dieser Angelegenheit. Selbst hatte ich den Baustein bisher
immer nur mit 5V über den C-USB-Anschluss betrieben und musste den Akkubetrieb
somit erst einmal testen. Grundsätzlich erwies sich dieser dabei auch
möglich, was aber fehlte, war eine über das Board steuerbare Schaltmöglichkeit
für seine Betriebsspannung. Leider brachte die versuchsweise
getestete, von den ESP32-Prozessoren bereitgestellte Deep-Sleep-Funktion
hierbei auch nicht die gewünschte Lösung. Nachdem über sie
nicht auch die zur Versorgung externer Einheiten, wie in userem Fall
dem GPS-Modul verwendeten Spannungsausgänge deaktivierbar waren, dürfte
man für den Akkubetrieb vermutlich nicht um die Verwendung eines externen,
in eine der Versorgungsleitungen eingefügten Schalters herumkommen.
Linkliste
[1] http://www.kh-gps.de/locator-v3-26.zip
[2] https://www.espressif.com/en/support/download/other-tools
[3] https://k7fry.com/grid/
[4] https://www.3d-loewe.de/
